Andreas ten Pas
Computer Science PhD Candidate at Northeastern University
atp at ccs dot neu dot edu
College of Computer and Information Science
Northeastern University
805 Columbus Ave
ISEC, #560-574
Boston, MA 02120, USA
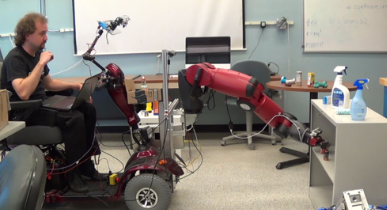
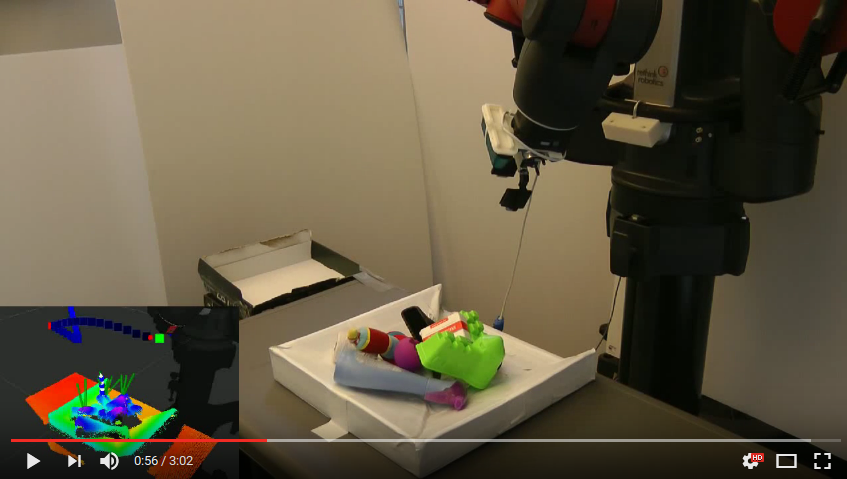
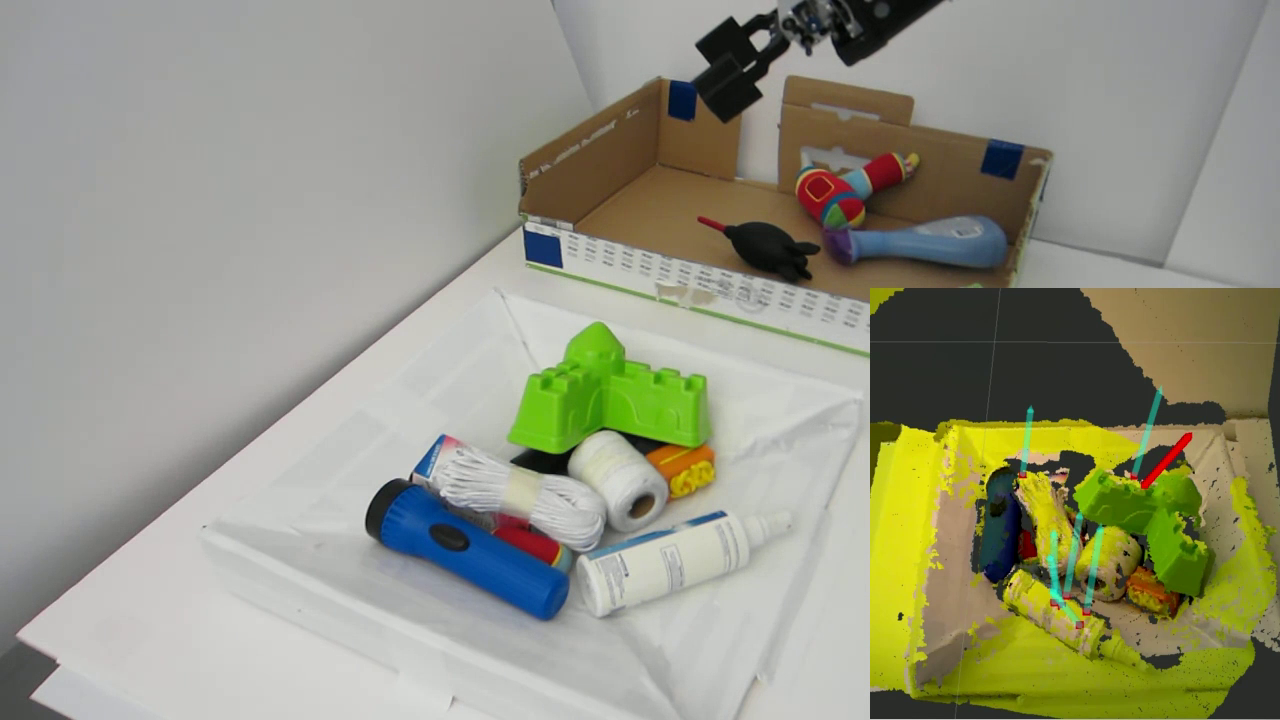
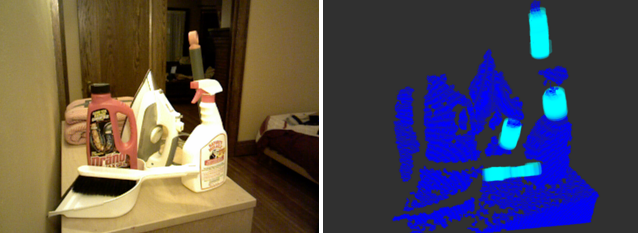
Present: Perception for robotic grasping and manipulation, deep learning, simulation based planning.
Past: Game theory, fairness in multi-agent systems.