CS4610: L0 - Course Overview, Common Types of Robots
Basic Parameters
- instructor: Marsette Vona vona@ccs.neu.edu
- lecture, office hours, TA info on website
- website
http://www.ccs.neu.edu/course/cs4610- includes course schedule
- also defines course policies, including academic honesty
- most course materials will be distributed only via the course website
- assignment 0 is to visit the course website and to send me an email
Overview of the course
- part 0: wheeled locomotion
- part 1: obstacle avoidance and navigation
- part 2: arm kinematics and grasping
- part 3: robot vision
- part 4: integrated abilities
Introductions
What Is a Robot?
- My definition: A robot is a machine intended to replicate [part of] the function of a human or other animal.
- Key parts of most robots include
- sensing—interface components that measure aspects of the physical robot or its surroundings and make the information available to computation
- actuation—interface componets that modify aspects of the physical robot or its surroundings given information from computation
- control—computational algorithm that regulates or reacts to some aspect of the physical part of a robot or its surroundings, usually on a short timescale (often 1s or less)
- planning—computational algorithm that “thinks ahead” to make decisions about robot actions on moderate to long timescales (often 1s or longer)
Very Brief Introduction the field of Research Robotics
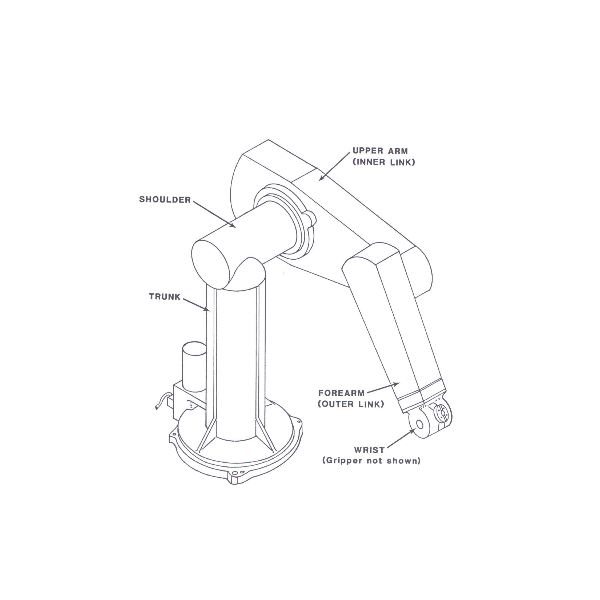
- manipulator robots (arms)
- torso robots
- walking robots
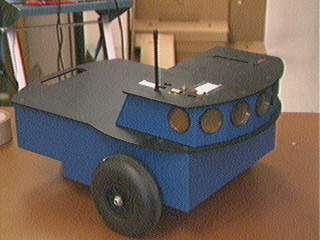
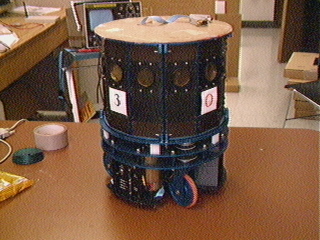
- wheeled and tracked robots
- flying robots
- helicopters and quadrotors
- planes
- blimps
- snake robots
- self-reconfiguring and modular robots
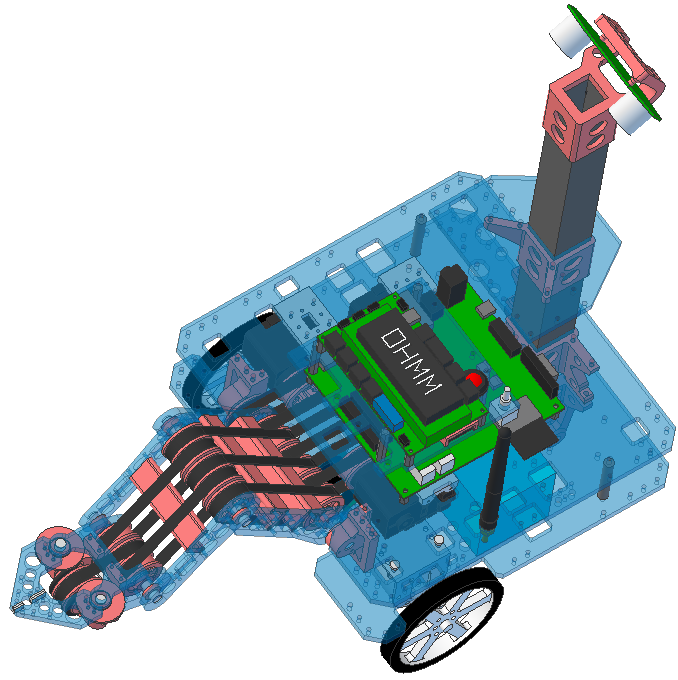
- mobile manipulators
- difficult to categorize robots
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
